

Thesis proposals.
LINKS Foundation makes a certain number of thesis proposals available, to be performed at the Foundation’s laboratories under close supervision by LINKS researchers.
If you are a university student at the end of your education path and are interested in discovering what the Foundation can offer to help you towards a professional career in research check the list of currently available thesis proposals right under and send your application to the e-mail address in the post.
You will be contacted by our administration staff to plan an exploratory meeting.
- - Available Theses
- Advanced Computing, Photonics & Electromagnetics
- AI, Data & Space
- Connected Systems & Cybersecurity
- Future cities & communities
- Innovation in Culture, Society and Public Administration
- Strategic Marketing & Innovation Services
- XR Lab
Thesis Code: 25004
Thesis Type: M.Sc. thesis in Engineering, computer science, environmental science
Research Area: Future Cities and Communities
Requirements
- Experience in using data analysis tools such as Python, R, or MATLAB to process and interpret collected data.
- Interest in programming, especially Arduino programming for sensor integration.
- Ability to conduct thorough literature reviews and stay updated on relevant advancements in environmental monitoring, climate change, and sensor technologies.
- Ability to critically interpret analytical results
Description
This thesis aims to explore the utilization of Arduino-based sensors to develop a comprehensive environmental monitoring system capable of detecting key parameters such as temperature, humidity, CO2 levels, lighting conditions, noise levels, and air pollution. The study will investigate the correlation between these environmental factors and the impacts of climate change, as well as their influence on the well-being of individuals residing and working in environments where these parameters are actively monitored.
The objective is to design and implement a real-time environmental monitoring system based on Arduino that detects CO₂ concentration and noise levels, and provides immediate feedback using a “traffic light” visual alert system whenever predefined thresholds are exceeded. The system will leverage edge computing, with all data processing handled directly on the microcontroller.
Furthermore, the thesis will propose strategies to correct and optimize the monitored parameters, aiming to bring them within optimal ranges conducive to human health and comfort. The proposed strategies for correction and optimization could serve as a foundation for the development of more sustainable and health-conscious living and working spaces in the face of ongoing climate challenges.
References
Arduino Documentation: https://docs.arduino.cc/
Dourado, A., Martins, L., & Alves, J. (2017). A Survey on Environmental Monitoring. Journal of Sensors, 2017. DOI: 10.4304/jnw.10.11.606-615
Intergovernmental Panel on Climate Change (IPCC). (2021). Climate Change 2021: The Physical Science Basis. Contribution of Working Group I to the Sixth Assessment Report. https://www.ipcc.ch/report/ar6/wg1/
World Health Organization (WHO). (2018). Ambient air pollution: Health impacts. https://www.who.int/airpollution/ambient/health-impacts/en/
Cincinelli A, Martellini T. Indoor Air Quality and Health. Int J Environ Res Public Health. 2017 Oct 25;14(11):1286. doi: 10.3390/ijerph14111286. PMID: 29068361; PMCID: PMC5707925. https://www.ncbi.nlm.nih.gov/pmc/articles/PMC5707925/
Contacts: send a resume with attached the list of exams to maurizio.arnone@linksfoundation.com specifying the thesis code and title.
Thesis Code: 25003
Research Area: Connected Systems & Cybersecurity (CSC)
Description
In general, for public safety, all types of bridges require regular inspections in order to assess their health status. In this context, the Italian law imposes quarterly inspections where bridges’ stability conditions, their structural elements and conservation need to be assessed. Unfortunately, current UAV-based inspection solutions have significant limitations. Indeed, these solutions can accurately monitor only accessible parts of the bridge structure, while the most critical structural elements remain uninspected due to unreliable GNSS-based localization in the obstructed areas beneath the bridge. In fact, without a robust localisation service, it is challenging to ensure a safe and stable UAV flight beneath the bridge area.
In this challenging scenario, the localization service based only on GNSS is not enough because it provides accurate position estimation only in open sky condition, while beneath the bridge area the satellite signal is obstructed. Consequently, GNSS-only solutions might either heavily degrade or completely fail. A possible monitoring solution would employ a fleet of automated UAVs capable of performing bridge inspection tasks in an efficient way, even in GNSS-denied areas, with reduced time, costs, and risks for human being, and zero impact for the environment.
Objectives
The goal of this thesis is to develop an accurate positioning system for a fleet of UAV-based bridge inspection solutions. More specifically, the activity will be focused on the design and development of a cooperative and hybrid algorithm that combines: positioning data GNSS-RTK (from UAVs with good satellite visibility), measurements from IMU and Ultra-WideBand (UWB)-based ranging measurements performed by the inspection UAV with respect to supportive UAVs moving along the bridge with almost full sky visibility.
Initially, the designed algorithm will be first optimized offline using real data from ROS bag. Subsequently, the optimized algorithm will be implemented in real devices, and its performance will be evaluated first in the Robotic Laboratory made available by LINKS and then in outdoor environments. During the tests in the Robotic Laboratory, the localization performance will be evaluated by using the VICON system as ground truth.
Requirements
– Strong knowledge in software development (C/C++)
– Good knowledge of MATLAB
– Good knowledge in mathematical derivation
– Proactive mindset, problem-solving oriented
– Data processing skills
– Familiarity with embedded platforms (e.g., Raspberry PI) and Linux environment
Duration: 6-8 months.
Contacts: please send a resume with attached the list of exams passed during the Bachelor of Science and Master of Sciences to francesco.sottile@linksfoundation.com specifying the thesis code and title.
Thesis Code: 25002
Thesis Type: M.Sc. thesis in Computer Engineering / M.Sc. thesis in ICT for Smart Societies / M.Sc. thesis in Mobility Engineering / M.Sc. thesis in Civil Engineering / M.Sc. thesis in Mathematical Engineering / equivalent
Research Area: Future Cities & Communities (FCC)
Description
The rise of autonomous driving technologies and their integration into urban mobility systems are transforming the transportation landscape, posing both opportunities and challenges for researchers, policymakers, and industry stakeholders.
This thesis aims to address two key aspects of autonomous driving simulation: (i) comparative analysis of autonomous driving simulators; (ii) co-simulation framework development.
The thesis will evaluate different autonomous driving simulators (e.g. CARLA and its competitors, preferably open-source solutions). The comparison will focus on critical aspects such as simulation realism, scalability, adaptability for different scenarios, integration with external traffic simulators, and ease of use.
The thesis will explore co-simulation approaches involving the traffic simulator SUMO and the autonomous driving simulator CARLA, as well as SUMO and competitors of CARLA. This includes synchronization of traffic flows between SUMO and the autonomous driving simulator; integration of real-world data into the co-simulation for enhanced fidelity; testing autonomous driving algorithms in mixed traffic scenarios using the developed co-simulation framework.
The thesis will provide insights into the strengths and limitations of different simulators and co-simulation configurations, offering guidelines for their application in the study and development of autonomous driving solutions.
The thesis will be carried out jointly between the Politecnico di Torino (Department of Control and Computer Engineering – DAUIN and Department of Environment, Land and Infrastructure Engineering – DIATI), Fondazione LINKS (‘Future Cities & Communities’ Research Domain), and Tecnocad (TC Autonomous, the division dedicated to advanced autonomous driving solutions in passenger transport).
Requirements:
- Interest in autonomous driving technologies and traffic simulation tools
- Interest in transport models and planning
- Experience with data analysis and simulation platforms
- Experience with Python and main programming languages
- Interest in using Geographic Information Systems (GIS)
- Ability to critically interpret analytical results
- Strong analytical and critical thinking skills
Contact: send a resume with attached the list of exams to maurizio.arnone@linksfoundation.com specifying the thesis code and title.
Thesis Code: 25001
Thesis Type: Master Thesis for Computer Science, Computer Engineering, Electronic Engineering, Physic Engineering, Quantum Engineering, Applied Mathematics
Research Area: Advanced Computing, Photonics & Electromagnetics
Description
Quantum Computing is transforming the landscape of computational problem-solving by leveraging the principles of quantum mechanics to perform tasks that are infeasible for classical computers. This master thesis explores various subtopics within the domain of quantum computing, providing a comprehensive analysis of its theoretical foundations, algorithmic developments, practical applications and low-level programming and emulation. The work’s focus can be chosen from several key areas, including quantum algorithms (such as Quantum Approximate Optimization Algorithm and Shor’s algorithm), quantum error correction, quantum hardware technologies (e.g., superconducting qubits and neutral atom systems), and domain-specific applications in optimization, machine learning and financial modelling. By addressing challenges and opportunities in each subfield, the thesis aims to contribute to the growing body of knowledge and offer innovative insights into harnessing quantum technologies for solving real-world problems.
The topics include, but are not limited at, the following:
- Testing small-scale logical qubits: characterization of error correction/detection methodologies on superconducting machines, including LINKS’s IQM Spark superconducting computer
- Neutral atoms compilation framework: development of an emulation framework for atom shuttling in a quantum register and/or related heuristics for digital machine
- Near-term quantum algorithms for finance: development of quantum methodologies (e.g., Circuit knitting, reservoir computing, etc.) for a specific financial use cases (such as default prediction, portfolio optimization, option pricing etc.)
- Quantum optimization: development and implementation of hybrid NISQ algorithms for different combinatorial optimization problems (such as graph coloring) using both digital and analogue quantum computers
- Quantum Machine Learning: development and implementation of QML methods and algorithms (Quantum kernels, QNN, etc.) for different tasks (such as protein classification) using both digital and analogue quantum computers
- Quantum Image Processing: exploration and implementation of quantum image processing techniques (e.g. Quantum Fourier Transform) for applications in astrophysics and cosmology
Requirements
- MS students in Computer Science, Computer Engineering, Electronic Engineering, Physic Engineering, Quantum Engineering, Applied Mathematics
- Experience with main programming languages (Python, C/C++), algorithms
Whenever possible and relevant, the work will include the implementation and execution on real quantum hardware (such as the IQM Spark acquired by LINKS and neutral atom platforms available on cloud). Moreover, the topic can be complemented/extended through a curricular internship period.
Contact: Send CV to giacomo.vitali@linksfoundation.com and chiara.vercellino@linksfoundation.com specifying the thesis code, title and specific topic(s) of interest.
Thesis Code: 24021
Research Area: Connected Systems and Cybersecurity
Motivation
Sensor fusion is a crucial aspect of robotics, especially in autonomous navigation. Sensors are inherently affected by noise, errors, and typically measure only specific aspects of the environment. To enhance their output and obtain a comprehensive perception of both the surroundings and the robot’s status, data from multiple sensors can be collected and fused. This process optimizes measurements, also ensuring redundancy and robustness. Sensor fusion is particularly useful for integrating localization sensors to compute both robot’s position and orientation on a map. Recently, various algorithms for sensor fusion have been developed.
Objectives
The aim of this thesis is to explore the development, integration, and testing of factor graphs for sensor fusion, one of the most widely used techniques in current literature. This algorithm will be employed to fuse data from sensors such as wheel odometry, GNSS-RTK, cameras, IMU, and UWB-based localization, in order to localize an autonomous rover during navigation. The objective is to investigate existing solutions in the literature, integrate them into RO2-based environment, and evaluate their performance.
The main steps include:
• Exploration of state-of-the-art sensor fusion techniques, with a focus on factor graphs.
• Investigation of open-source libraries that facilitate the implementation of factor graphs in a ROS2-based environment.
• Development and integration of these libraries into the middleware software developed by LINKS.
• Testing the solution in a simulated environment (e.g., Gazebo) and, potentially, on a prototype rover such as the TurtleBot or Scout 2.0.
Requirements
– Computer Science, Mechatronics, or similar background
– C++/Python programming languages
– ROS/ROS2 knowledge will be considered a plus
– Linux OS knowledge will be considered a plus
– Some knowledge in communication protocols and sensor fusion will be considered a plus
– Proactive mindset, problem-solving oriented
Duration: 6-8 months.
Contacts: please send a resume with attached the list of exams to enrico.ferrera@linksfoundation.com and gaia.zinni@linksfoundation.com
Thesis Code: 24020
Research Area: Connected Systems and Cybersecurity
Motivation
In recent years, the autonomous operation of mobile robots has significantly progressed. These robots are now used in various domains, from industrial automation to exploring dangerous environments. One major challenge for these systems is to autonomously operate in GNSS-denied environments. Therefore, having robust and reliable localization methods, alternative to GNSS, is important.
Recently, Visual Odometry (VO) is attracting increasing attention because of its lightweight, accuracy, and reliability, which has been successfully applied to many real-time robotic systems. However, VO methods suffer from localization drift over long trajectories due to the inherent limitations of visual-based localization methods. To address this issue, recent research has explored the integration of VO with Ultra-WideBand (UWB) technology and Inertial Movement Unit (IMU) sensors.
Objectives
The goal of this thesis is to improve the localization accuracy of VO solutions by integrating data from both UWB positioning technology and IMU sensor. Several integration approaches, of different complexity, can be found in literature. In this thesis a Factor Graph (FG) framework will be adopted to perform such data fusion. FG describes positioning problems in terms of optimization problems, allowing the solution to be obtained over multiple iterations, differently from other traditional navigation filters such as Extended Kalman Filter (EKF).
The thesis activity will be focused on the design and development in Matlab environment of a positioning algorithm, based on the FG framework, combining VO, IMU and UWB measurements. In particular, UWB ranging measurements will be performed by a mobile robot with respect to fixed UWB devices, called UWB anchors, whose positions are well known.
Initially, the designed FG algorithm will be tested through computer simulations. Subsequently, real measurements will be collected by a rover platform (equipped with VO, UWB and IMU sensors) moving in the Robotics Laboratory made available by LINKS. The collected measurements will then be used to test and optimize the algorithm off-line.
Requirements
– Strong knowledge of MATLAB
– Good knowledge in software development (C/C++)
– Good knowledge in mathematical derivation
– Proactive mindset, problem-solving oriented
– Data processing skills
Duration: 6-8 months.
Contacts: please send a resume with attached the list of exams passed during the Bachelor of Science and Master of Sciences to francesco.sottile@linksfoundation.com specifying the thesis title.
Thesis Code: 24019
Research Area: Connected Systems and Cybersecurity
Description
This thesis investigates the application of a modern 3D game engine to model and reproduce a specific part of the city of Turin and visualize real-time data from an existing digital twin (DT). The primary objective is to evaluate the capability of 3D game engines, such as Unreal Engine or Unity, to create a high-fidelity, interactive virtual environment synchronized with live data from the digital twin. The study focuses on developing a framework that enables seamless data integration, visualization, and real-time updates within the 3D world, leveraging data already collected and processed by the DT. The thesis involves selecting the most suitable 3D game engine, building a realistic and interactive representation of a portion of Turin, and implementing connectivity to the digital twin to visualize dynamic field data in real time. The outcomes will offer insights into the usability of game engines for urban visualization and smart city monitoring applications.
Requirements
- Experience in C++ or C# for game engine development
- Python programming for data integration
- Familiarity with communication protocols and APIs
- Experience with 3D modeling and real-time rendering techniques
- Linux OS and/or Windows development environments
Duration: 6-8 months
Contacts: send a resume with attached the list of exams to edoardo.bonetto@linksfoundation.com and daniele.brevi@linksfoundation.com
Thesis Code: 24018
Research Area: Connected Systems and Cybersecurity
Description
This thesis investigates the application of deep learning techniques for real-time object detection and tracking using 3D LiDAR point cloud data. The objective is to develop a system capable of detecting and tracking multiple objects in dynamic environments using deep learning architectures. The research focuses on processing point cloud data from a 3D LiDAR sensor to identify, classify, and track various objects such as vehicles, pedestrians, and cyclists. The proposed system will implement recent advances in point cloud processing networks (e.g., PointPillars, PointRCNN) combined with multi-object tracking algorithms to achieve high-performance real-time detection and tracking.
The evaluation will be conducted using both established benchmark datasets and real-world road scenario data collected from actual LiDAR sensors. To validate the system’s accuracy, the results will be compared against camera-based detection methods and ground truth annotations, providing a comprehensive assessment of the LiDAR-based approach’s effectiveness in real-world applications.
Requirements
- Computer Science, Mechatronics, or similar background
- Experience with deep learning frameworks (PyTorch, TensorFlow)
- C++/Python programming languages
- Experience with point cloud processing will be considered a plus
- Linux OS knowledge will be considered a plus
- Proactive mindset, problem-solving oriented
Duration: 6-8 months
Contacts: send a resume with attached the list of exams to federico.princiotto@linksfoundation.com and daniele.brevi@linksfoundation.com
Thesis Code: 24017
Research Area: Connected Systems and Cybersecurity
Description
This thesis investigates the application of NVIDIA Isaac ROS Nvblox for reconstructing 3D scenes of the environment. The primary objective is to evaluate the capability of Nvblox in generating accurate and detailed representations of environment using data from various sensors installed on AMRs. These sensors may include cameras (e.g., front view, side view) and LiDARs (e.g., front-facing solid-state LiDAR, 360° rotating LiDAR). In the proposed scenario, on-board sensors from AMRs are used to capture the scene as they pass across the environment where the robots are deployed. The thesis aims to implement this scenario on a portion of an indoor environment to assess the performance and effectiveness of Nvblox technology in this specific context. The study involves collecting sensor data under controlled conditions and then using Nvblox to reconstruct the scene with the acquired data. The outcomes will provide insights into the feasibility and accuracy of using Nvblox for real-world scenarios, contributing to the fields of building inspection and monitoring.
Requirements
- Computer Science, Mechatronics, or similar background
- C++/Python programming languages
- Some knowledge in communication protocols and computer vision will be considered a plus
- Linux OS knowledge will be considered a plus
- ROS/ROS2 knowledge will be considered a plus
- Proactive mindset, problem-solving oriented
Duration: 6-8 months.
Contacts: send a resume with attached the list of exams to gianluca.prato@linksfoundation.com enrico.ferrera@linksfoundation.com
Thesis Code: 24015
Thesis Type: Master’s Degree Thesis in Systemic Design, or similar
Research Area: Extended Reality Lab (XR Lab) – Innovation in Culture, Society and Public Administration
Requirements:
- Foundations of User Experience Design
- Foundations of System and Service Design
Description:
The thesis proposal is part of a project aimed at developing a city in the Metaverse, an immersive and interactive virtual environment conceived as a convergence point for organizations operating in the cultural world (including live entertainment).
The main objective of this project is to explore the multiple possibilities offered by the Metaverse to the involved organizations, allowing them to use this platform as a tool to promote their projects, establish collaborations, and create innovative artistic content and performances. The Metaverse will represent a dynamic and flexible space where organizations can interact with their audience in completely new and engaging ways, expanding communication and engagement opportunities.
Specifically, the candidate will be involved in supporting the co-design and Design Thinking process of the city in the Metaverse along with the involved organizations. This will involve planning focus groups and technical workshops aimed at defining the city concept, user experience, and creating a detailed map that includes the public and private locations of various organizations.
START DATE: 09/2024
Contacts:
Send a resume with attached the list of exam to massimo.migliorini@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24014
Thesis Type: Master’s Degree Thesis in Computer Engineering, Cinema and Media Engineering, or similar
Research Area: Extended Reality Lab (XR Lab) – Innovation in Culture, Society and Public Administration
Requirements:
- Knowledge of C#
- Development experience with Unity
- 3D modeling and animation experience with Blender
Description:
The thesis proposal focuses on the design and development of a virtual reality (VR) simulation aimed at training civilian operators, particularly police officers. The candidate will be tasked with creating a simulation that includes different training scenarios set in an urban context.
The candidate will be responsible for overseeing the entire software lifecycle, which includes the following phases:
- Storyboard Definition and Validation: The candidate will work closely with police operator representatives to define and validate a detailed storyboard. The storyboard will serve as a guide for simulation development and should align with the needs and operational procedures of the operators.
- Creation of 3D Assets with Blender: Using Blender software, the candidate will be responsible for creating all necessary 3D assets for the simulation. These assets will include building models, vehicles, urban objects, and characters relevant to the training scenarios.
- Application Development with Unity: Using the Unity game engine, the candidate will program and develop the VR simulation application. This will include implementing 3D assets created with Blender, creating intuitive user interfaces, and programming engaging and realistic training scenarios.
- Software Testing and Validation: Once the application development is complete, the candidate will conduct a series of tests to ensure that the simulation functions properly and is effective for training purposes
START DATE: 09/2024
Contacts:
Send a resume with attached the list of exam to massimo.migliorini@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24013
Thesis Type: M.Sc. thesis in ICT for Smart Societies, Computer Science, Mechatronics, Electronics, Information Technology
Research Area: Connected Systems & Cybersecurity
Requirements:
- Knowledge of Python.
- Data science skills, concerning data analysis, processing, and deep learning.
- Image processing, modern computer vision skills.
- 3D visualizations skills are a plus.
Description
This thesis explores the application of Neural Radiance Fields (NeRF) for the reconstruction of vehicle accident scenes. The primary objective is to assess the capability of NeRF in creating accurate representations of the scenes using data from various sensors installed in vehicles. These sensors may include cameras (e.g. front view, side view) and lidars (e.g. front-facing solid-state LiDAR, 360° rotating LiDAR). In the envisioned scenario, on-board sensors from surrounding cars are used to capture the scene when they transit in the vicinity of an accident location. The thesis aims to replicate this scenario on a smaller scale to evaluate the performance and effectiveness of NeRF technology in this specific context. The study will involve using sensor data collected under controlled conditions simulating a vehicle accident and then using NeRF to reconstruct the scene using the acquired data. The outcomes will provide insights into the feasibility and accuracy of using NeRF for real-world accident scene reconstruction, contributing to the fields of emergency response, insurance, and traffic management.
Contact: send a resume with attached the list of exams to: edoardo.pristeri@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24012
Thesis type: M.Sc. in Machine Learning, Data Science, Computer Science, Mathematics, or similar
Keywords: image processing, deep learning, computer vision
Requirements:
- Knowledge of Python
- Software development skills
- Basic concepts of data science, concerning data analysis, processing and machine learning
- Basic concepts of image processing, modern computer vision preferred but not required.
Description:
The proposed thesis focuses on the application of super-resolution techniques to images acquired by the Sentinel-3 satellite in order to improve their spatial resolution, with Sentinel-2 used as the reference ground truth. The main objective is to obtain daily maps of the Normalized Difference Vegetation Index (NDVI) in the agricultural context.
NDVI is a key measure for assessing crop health and vegetation coverage, and its daily availability is essential for more precise and timely agricultural management. Sentinel-3, with its daily acquisition frequency, offers a unique opportunity to monitor agricultural dynamics on a daily basis. However, its spatial resolution may not be sufficient to capture crucial details at the field level.
The proposed super-resolution approach in this work leverages the high-resolution information provided by Sentinel-2, a satellite known for its excellent spatial resolution. By using Sentinel-2 as ground truth, the aim is to train machine learning models capable of learning the complex relationships between the spectral characteristics of Sentinel-3 images and the high-resolution ones of Sentinel-2.
Expected results include daily NDVI maps obtained through the super-resolution process, which will allow for a more detailed and accurate assessment of vegetative conditions in agricultural areas. This work will significantly contribute to improving the informational resources available to farmers, facilitating more timely and targeted decisions, with positive impacts on crop management and agricultural sustainability. The proposed methodology could be extended to other spectral indices and geographic areas, providing a significant contribution to the scientific community in the field of agricultural satellite monitoring.
Contact: send a resume with attached the list of exams to federico.oldani@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24010
Thesis type: M.Sc. in Machine Learning, Data Science, Computer Science, Mathematics, or similar
Keywords: computer vision, image processing, earth observation, clouds removal, deep learning
Requirements:
- Knowledge of Python
- Software development skills
- Basic concepts of data science, concerning data analysis, processing and machine learning
- Basic concepts of image processing
Description:
Clouds and atmospheric phenomena can significantly affect the quality and utility of satellite images, including Sentinel-2 optical images. However, Synthetic Aperture Radar (SAR) images are not affected by clouds and can be used to complement optical images for cloud removal in areas where clouds are prevalent. Therefore, developing an efficient and accurate technique able to reconstruct cloud-covered information while preserving originally cloud-free details from Sentinel-2 images, using both optical and SAR data, is crucial for various applications, including land cover classification, burned area delineation, and natural resource management.
The proposed thesis aims to develop an efficient and accurate deep learning technique for clouds removal from Sentinel-2 images using SAR data. The candidate will explore available datasets (SEN12MS-CR, SEN12MS-CR-TS) and current state-of-the-art methods (GLF-CR, DSen2-CR, …) to understand the possible solutions to the task and develop a new deep learning-based algorithm.
The thesis will include the following activities: (i) dataset and models exploration, (ii) development and implementation of a deep learning model, (iii) model evaluation and comparison, (iv) result visualization.
Resources:
- Datasets and models: https://paperswithcode.com/task/cloud-removal
- Survey: https://www.mdpi.com/2072-4292/15/4/1137
Contact: send a resume with attached the list of exams to edoardo.arnaudo@linksfoundation.com and marco.galatola@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24010
Thesis type: M.Sc. in Machine Learning, Data Science, Computer Science, Mathematics, or similar
Keywords: computer vision, image processing, earth observation, clouds removal, deep learning
Requirements:
- Knowledge of Python
- Software development skills
- Basic concepts of data science, concerning data analysis, processing and machine learning
- Basic concepts of image processing
Description:
Clouds and atmospheric phenomena can significantly affect the quality and utility of satellite images, including Sentinel-2 optical images. However, Synthetic Aperture Radar (SAR) images are not affected by clouds and can be used to complement optical images for cloud removal in areas where clouds are prevalent. Therefore, developing an efficient and accurate technique able to reconstruct cloud-covered information while preserving originally cloud-free details from Sentinel-2 images, using both optical and SAR data, is crucial for various applications, including land cover classification, burned area delineation, and natural resource management.
The proposed thesis aims to develop an efficient and accurate deep learning technique for clouds removal from Sentinel-2 images using SAR data. The candidate will explore available datasets (SEN12MS-CR, SEN12MS-CR-TS) and current state-of-the-art methods (GLF-CR, DSen2-CR, …) to understand the possible solutions to the task and develop a new deep learning-based algorithm.
The thesis will include the following activities: (i) dataset and models exploration, (ii) development and implementation of a deep learning model, (iii) model evaluation and comparison, (iv) result visualization.
Resources:
- Datasets and models: https://paperswithcode.com/task/cloud-removal
- Survey: https://www.mdpi.com/2072-4292/15/4/1137
Contact: send a resume with attached the list of exams to edoardo.arnaudo@linksfoundation.com and marco.galatola@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24009
Thesis type: M.Sc. in Machine Learning, Data Science, Computer Science, Mathematics, or similar
Keywords: image processing, deep learning, computer vision
Requirements:
- Knowledge of Python
- Software development skills
- Basic concepts of data science, concerning data analysis, processing and machine learning
- Basic concepts of image processing, modern computer vision preferred but not required.
Description:
This thesis focuses on developing an efficient and accurate deep learning-based Super-Resolution (SR)technique specifically tailored for enhancing Sentinel-2 satellite imagery. By leveraging time series of optical, and possibly SAR data, the goal is to enhance the openly available Sentinel-2 imagery by increasing its resolution. This capability is crucial for various applications, including land cover classification, urban classification, and natural resource management.
The proposed methodology will involve extensive exploration of available datasets, such as SAtlas and Proba-V, and state-of-the-art superresolution methods like SRCNN, ESRGAN, and SR3. Through comprehensive analysis and experimentation, a novel deep learning-based algorithm will be developed and implemented to address the challenges of superresolution in varying geographical areas.
The thesis will encompass the following activities: (i) thorough investigation of datasets and existing methods, (ii) design and implementation of a deep learning model tailored for superresolution, (iii) rigorous evaluation and comparison of the proposed technique with established approaches, and (iv) visualization of results to demonstrate the effectiveness and applicability of the developed methodology.
Contact: send a resume with attached the list of exams to edoardo.arnaudo@linksfoundation.com , marco.galatola@linksfoundation.com and luca.barco@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24008
Thesis type: M.Sc. in Machine Learning, Data Science, Computer Science, Mathematics, or similar
Keywords: image processing, deep learning, computer vision
Requirements:
- Knowledge of Python
- Software development skills
- Basic concepts of data science, concerning data analysis, processing and machine learning
- Basic concepts of image processing, modern computer vision preferred but not required.
Description:
Recognizing artworks in the middle of variations in imaging conditions poses a significant challenge in image retrieval systems. This thesis proposal centers on leveraging a dataset comprising images of artworks, including paintings, sculptures, and more, to refine the capabilities of a deep learning model. The primary aim is to fine-tune the model’s performance specifically for artwork retrieval, addressing scenarios where queries may contain images of the same artwork subject to noise or alterations during acquisition.
The objective is to strengthen the model’s robustness in identifying artworks despite potential alterations, such as changes in lighting, blur, orientation, occlusion, and other factors. This adaptation aims to facilitate accurate recognition even in the presence of varying conditions, ensuring reliability in retrieving specific artworks from a database.
The proposed approach involves self or semi-supervised fine-tuning of the model, employing contrastive learning techniques. This process aims to enhance the model’s ability to differentiate between similar artworks while maintaining sensitivity to new artwork not initially included in the training dataset. The emphasis lies in ensuring that the model’s robustness is complemented by its capacity to retrieve diverse artworks beyond the existing database.
Throughout the thesis, the activities will include: dataset preparation and curation, model fine-tuning using self or semi-supervised learning methods, implementation and experimentation with contrastive learning techniques, evaluation of the model’s performance against varying conditions and noise levels, and validation through retrieval tasks with both known and unseen artworks.
This research aligns with the flourishing field of image retrieval in art, addressing the practical need for systems capable of recognizing artworks despite potential alterations in query images. By refining deep learning models through fine-tuning and contrastive learning techniques, this work strives to advance the reliability and adaptability of artwork recognition systems, catering to real-world demands in art curation, authentication, and retrieval.
Contact: send a resume with attached the list of exams to giacomo.blanco@linksfoundation.com, tommaso.monopoli@linksfoundation.com, luca.barco@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24007
Thesis type: M.Sc. in Machine Learning, Data Science, Computer Science, Mathematics, or similar
Keywords: EO data, deep learning, computer vision, aerial imagery
Requirements:
- Knowledge of Python
- Software development skills
- Basic concepts of data science, concerning data analysis, processing and machine learning
- Basic concepts of image processing, modern computer vision preferred but not required.
Description:
The escalating demand for improved spatial resolution in temperature data has propelled a heightened interest in innovative approaches that combine satellite-derived information with ancillary data sources. This thesis proposal aims to address the challenge of enhancing the spatial resolution of Sentinel-3 temperature data by integrating it with Digital Elevation Model (DEM) and land cover data.
The primary objective of this research is to develop a deep learning model capable of increasing the spatial resolution of Sentinel-3 temperature data. This will be achieved through the incorporation of DEM and land cover data to provide a more detailed and accurate representation of temperature variations across different topographic features.
The proposed methodology involves several phases. Firstly, an extensive review of existing techniques for enhancing spatial resolution in satellite-derived data will be conducted to identify the field’s most effective methodologies and eventual datasets. Subsequently, the collected Sentinel-3 temperature data will be combined with DEM and land cover data to create a comprehensive dataset.
The core of the research involves the development and training of a deep learning model. Landsat 8 satellite data, obtained concurrently with Sentinel-3 data, will be employed as supervisory information during the training phase. This supervised learning approach aims to leverage the high spatial resolution of Landsat 8 to guide the deep learning model in enhancing the spatial resolution of Sentinel-3 temperature data.
This research aims to contribute novel insights and methodologies to address the challenges associated with improving the spatial resolution of satellite-derived environmental data.
Contact: send a resume with attached the list of exams to giacomo.blanco@linksfoundation.com, luca.barco@linksfoundation.com and lorenzo.innocenti@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24006
Thesis type: M.Sc. in Machine Learning, Data Science, Computer Science, Mathematics, or similar
Keywords: 3D data, deep learning, computer vision, aerial imagery
Requirements:
- Knowledge of Python
- Software development skills
- Basic concepts of data science, concerning data analysis, processing and machine learning
- Basic concepts of image processing, modern computer vision preferred but not required.
Description:
The growing interest in achieving enhanced urban planning and management has sparked a surge in exploring advanced technologies for comprehensive data analysis, particularly the utilization of drones for data acquisition in urban environments. This thesis proposal aims to address the segmentation challenges inherent in processing 3D data acquired from drones operating in urban contexts.
The primary focus of this research is to develop advanced segmentation techniques for extracting meaningful information from 3D point clouds obtained by drones. The integration of drone-acquired data into urban planning and environmental management necessitates the development of robust segmentation algorithms that can identify and categorise various urban elements such as buildings, roads, vegetation, and other structures.
The proposed methodology involves several phases. Firstly, a comprehensive review of state-of-the-art techniques in 3D data segmentation will be conducted to identify the most effective methodologies and tools in the field, as well as external datasets of urban point cloud data. Subsequently, the most promising methodologies will be applied to external datasets together with the collected 3D data in Turin.
The evaluation and optimization of the proposed segmentation models will be a crucial aspect of this research. Quantitative metrics, such as accuracy and IoU (interception over union), will be employed to assess the model performance, and adjustments will be eventually made to enhance their effectiveness.
In conclusion, the segmentation of 3D data acquired from drones in urban environments represents a critical step towards unlocking the full potential of drone technology in urban planning and environmental monitoring. This research seeks to contribute novel insights and methodologies to address the challenges associated with extracting meaningful information from drone-acquired 3D data in complex urban landscapes.
Contact: send a resume with attached the list of exams to giacomo.blanco@linksfoundation.com and luca.barco@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24005
Thesis type: M.Sc. in Machine Learning, Data Science, Computer Science, Mathematics, or similar
Keywords: image processing, deep learning, computer vision, aerial imagery
Requirements:
- Knowledge of Python
- Software development skills
- Basic concepts of data science, concerning data analysis, processing and machine learning
- Basic concepts of image processing, modern computer vision preferred but not required.
Description:
Satellite remote sensing images provide valuable information about land cover and land use, which can be used for various applications, including environmental monitoring, resource management, and urban planning. However, interpreting these images is a challenging task due to the complexity and variability of the Earth’s surface. This thesis proposes to investigate a multi-modal approach for land cover segmentation from Sentinel images at European Scale. The primary objective is to develop accurate and efficient models that can effectively leverage multi-modal information for land cover segmentation.
Starting from existing datasets and resources, the aim of the thesis is to retrieve and process Sentinel feeds and other modalities to evelop a pipeline for computing the land cover on a European scale, starting from baseline approaches, and eventually developing ad-hoc methods.
The thesis includes the following activities: (i) Data identification and acquisition (ii) state of the art analysis (iii) data analysis and preprocessing (iv) experiments evaluation.
Contact: send a resume with attached the list of exams to edoardo.arnaudo@linksfoundation.com and marco.galatola@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24004
Thesis type: M.Sc. in Machine Learning, Data Science, Computer Science, Mathematics, Telecommunications, or similar
Keywords: data analysis, data mining, image processing, earth observation, timeseries
Requirements:
- Knowledge of Python
- Software development skills
- Basic concepts of data science, concerning data analysis, processing and machine learning
- Knowledge of signals
- Basic concepts of image processing, timeseries processing
Description:
Natural disasters are extreme and sudden events caused by environmental factors that injure people and damage property. As research foundation, we are interested in studying tools and applications for fast respond in case of natural disasters. After a disaster, for example, is extremely important rapidly address the rescue to the more damaged areas.
As LINKS Foundation we are working on different technologies, among which the satellite images coming from the Copernicus project. We are extending our studies on Sentinel-1 which is not cloud dependant, has a very short revisit times and includes SAR instrument. The Interferometric SAR (InSAR) exploits the phase difference between two complex radar SAR observations of the same area, taken from slightly different sensor positions, and extracts distance information about the Earth’s terrain. The aim of the thesis is to retrieve, analyze Sentinel-1 data, and develop a pipeline for computing the interferometry and persistent scatterer interferometry in order to extract multiple timeseries that represent the displacement of the ground surface.
The thesis includes the following activities: (i) Data identification and acquisition (ii) state of the art analysis (iii) data analysis and preprocessing (iv) inSAR computation (v) PSI computation (vi) BONUS: design a machine learning model to detect the critical areas in a pilot case.
Contact: send a resume with attached the list of exams to edoardo.arnaudo@linksfoundation.com and federico.oldani@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24003
Thesis type: M.Sc. in Machine Learning, Data Science, Computer Science, Mathematics, or similar
Research area: Ai, Data and Space
Keywords: Vision-Language Models, Multimodality, Modality Gap, Image processing, Language processing, Deep learning
Requirements:
- Knowledge of Python;
- Software development skills;
- Basic concepts of data science, concerning data analysis, processing and machine learning;
- Concepts of image processing, and language processing.
Description:
The emergence of large-scale pretrained Vision-Language Models (VLMs) like CLIP has revolutionized multimodal representation learning. These models excel in bridging the semantic gap between images and text. Despite advancements, a critical issue known as the Modality Gap, primarily observed in CLIP, remains unexplored in other VLM architectures.
This gap refers to the semantic misalignment between image and text representations. While CLIP has highlighted this gap, there’s no widely accepted measure or standard benchmark dataset for its evaluation, though datasets like MS COCO or Flickr30k can provide insights. This thesis aims to explore and address the Modality Gap in modern VLM architectures by devising methods for its quantification and visualization.
The project comprises a review and of large pre-trained VLM models with a focus on recent developments concerning the Modality Gap. The thesis will encompass the following activities: (i) Datasets and Models Identification: identify relevant benchmark datasets and pretrained VLM models, such as CLIP, ALBEF, Florence, FLAVA, and others. (ii) Data Analysis and Pre-processing: pre-process datasets to prepare them for Modality-Gap evaluation. (iii) Evaluation: Implement evaluation metrics and visualization methods to quantify the Modality Gap across different VLM architectures (utilizing frameworks like PyTorch, Keras, etc.). (v) Result Analysis and Visualization.
Contact: send a resume with attached the list of exams to federico.dasaro@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24002
Thesis type: M.Sc. in Machine Learning, Data Science, Computer Science, Mathematics, or similar
Research area: Ai, Data and Space
Keywords: image processing, deep learning, computer vision, aerial imagery, open set, OOD detection
Requirements:
- Knowledge of Python
- Software development skills
- Basic concepts of data science, concerning data analysis, processing and machine learning
- Basic concepts of image processing, modern computer vision preferred but not required.
Description:
Detecting out-of-distribution examples is important for safety-critical machine learning applications, including aerial imagery. Tasks like land cover classification usually deal with a fixed set of classes, mapping every pixel or image to one of these categories, regardless of the underlying distribution. This is far from optimal especially for operational purposes, where models are trained on localized datasets and applied in the wild on a larger scale.
However, OOD segmentation in aerial images in a relatively unexplored task, where benchmarks are not well defined, and solutions are still an open problem.
Therefore, the purpose of this work is to provide a complete and exhaustive survey about Open Set techniques, with focus on semantic segmentation methods (Anomaly Segmentation) and aerial settings (Open Set/Open World recognition).
The project will comprise several steps, from the analysis of the literature and current state-of-the-art approaches to the implementation and evaluation of different methods on benchmark datasets. The thesis will include the following activities: (i) data identification, and acquisition if required (ii) data analysis and pre-processing (iii) predictive model development, leveraging on machine learning and deep learning techniques (PyTorch, Keras, etc..), (iv) performance evaluation, (v) result analysis and visualization.
Contact: send a resume with attached the list of exams to edoardo.arnaudo@linksfoundation.com specifying the thesis code and title.
Thesis Code: 24001
Thesis Type: Laurea Magistrale in ingegneria gestionale
Research Area: SMI – Strategic Marketing & Innovation Services
Description
L’adozione della tecnologia blockchain ha visto applicazioni in ambito finanziario, assicurativo, logistico, manufatturiero ed in diversi altri contesti con soluzioni legate alla tracciabilità delle catene di fornitura. Il presente progetto di tesi vuole indagare la fattibilità economica di una soluzione, di nuova concezione, adibita al rilevamento e alla gestione di dati inerenti processi manifatturieri attraverso tecnologia blockchain.
L’analisi sarà effettuata attraverso un modello teorico, da costruire, che individui gli elementi da tenere in considerazione per definire gli impatti economici. In questo quadro, sono definite quattro attività di riferimento che verranno implementate considerando scenari multipli (ad esempio in relazione all’adozione di modelli di blockchain pubblica e privata):
- Stima dell’investimento iniziale (esempio: hardware/software, costi legati a sviluppo e personale);
- Stima delle spese correnti (esempio: servizi cloud, governance, transaction fees);
- Identificazione e quantificazione dei benefici associati all’adozione della tecnologia;
- Identificazione e valutazione dei rischi associati alla soluzione ed al raggiungimento dei benefici attesi.
Il progetto prevede il raffronto con le principali modalità tradizionalmente utilizzate per la valutazione degli investimenti (Total Cost of Ownership e NPV).
Si riportano di seguito due lavori di riferimento per il progetto, per comprendere il contesto dell’analisi che verrà effettuata:
- Pincheira, M., Donini, E., Vecchio, M., Giaffreda, R. (2023), An Infrastructure Cost and Benefits Evaluation Framework for Blockchain-Based Applications, Systems.
- Forrester (2018), Emerging Technology Projection: The Total Economic Impact™ of IBM Blockchain Projected Cost Savings and Business Benefits Enabled by IBM Blockchain.
Contatti: inviare curriculum con allegato l’elenco degli esami a alessandro.zerbetto@linksfoundation.com specificando codice e titolo della tesi.
Thesis Code: 23007
Thesis Type: Laurea Magistrale in ingegneria per l’ambiente e il territorio (environmental and land engineering), ingegneria civile (civil engineering), Data Science, ingegneria Informatica (computer engineering), ICT for Smart society o equivalente
Research Domain: Future cities & communities
Description
Sulla base delle attività già avviate dalla Regione Piemonte, questa ricerca mira ad approfondire gli aspetti legati agli aggiornamenti del sistema informativo territoriale (SIT) concentrandosi in particolare sullo studio delle fonti di dati disponibili e dei database per l’alimentazione e l’aggiornamento automatico delle informazioni relative alla rete infrastrutturale regionale piemontese. In questo scenario la ricerca si prefigge la finalità di individuare e testare metodi per la raccolta dati e l’automazione dei processi di aggiornamento del SIT mediante tecnologie innovative. Le attività previste includono:
- Benchmarking delle tecnologie abilitanti per i sistemi automatizzati di aggiornamento del SIT.
- Investigazione delle possibili integrazioni con modelli/dataset esterni esistenti.
- Test di almeno una delle tecnologie/metodi individuati.
Contatti: inviare curriculum con allegato l’elenco degli esami a maurizio.arnone@linksfoundation.com specificando codice e titolo della tesi
Thesis Code: 23006
Thesis Type: M.Sc. thesis in Computer Science, Mechatronics, Electronics, Information Technology
Research Domain: Connected Systems & Cybersecurity
Requirements
– Computer Science or similar background
– Strong knowledge of C++ programming language and object programming
– Good knowledge of data and communication protocols
– Some knowledge in developing Graphic interfaces
– Knowledge of Qt framework will be considered a plus
– Linux OS knowledge will be considered a plus
– Proactive mindset, problem-solving oriented
Motivation
Indoor localization using UWB (Ultra-Wide Band) technology is a growing research field enabling various aspects of modern technology, like service robotics, augmented reality and warehouse management. To better exploit its potential, a Monitoring and Control Tool (MCT) capable of interacting with a robotic platform and displaying its status is essential. In particular, the MCT will interact with the UWB-based localization system and with other components of the robotic platform (e.g., UAV, UGV) in order to perform specific actions such as the execution of particular manoeuvres.
Objectives
The aim of this thesis is to develop new features for an existing MCT, developed by LINKS, to enable some new interactions with service robotics and display some new relevant charts. During the thesis, the candidate will collaborate with LINKS researchers (developing other modules of the robotic system), analyse the new features and find the best way to meet their requirements and integrate the outputs into a user-friendly MCT. The candidate will then develop such new features in Qt framework, integrating them with the existing MCT. For example, it might be necessary to use and update the current communication protocol with the localization server following these steps:
• Development of a standalone widget implementing the required functionalities
• Merge the widget into the full MCT
• Porting of the full MCT into a WebAssembly built web application
Each of these steps will be tested in real environment in our Robotics Lab employing UAVs and UGVs.
To better observe the results and evaluate some robotics performance, a comparison with our VICON system, based on infrared cameras, can be used as a ground truth.
Duration: 6-8 months.
Contact: please send a resume with attached the list of exams passed during the Bachelor of Science and Master of Sciences to luigi.coriasco@linksfoundation.com, delos.campos@linksfoundation.com and francesco.sottile@linksfoundation.com
Thesis Code: 23005
Thesis Type: M.Sc. thesis in Computer Science, Mechatronics, Electronics, Information Technology
Research Domain: Connected Systems & Cybersecurity
Requirements
– Computer Science, Electronics, or similar background
– C programming languages
– Knowledge on STM32 arm cortex processors will be considered a plus
– Linux OS knowledge will be considered a plus
– Proactive mindset, problem-solving oriented
Motivation
In the context of Indoor Positioning System (IPS), based on the Ultra-Wideband (UWB) technology, LINKS has developed a large scale Real Time Locating System (RTLS) with the aim of enabling autonomous navigation of Unmanned Aerial Vehicles (UAV) in indoor environments of any size. The UWB localisation system is composed of the following components: (i) fixed devices, located at known positions, called Anchors, (ii) mobile devices that need to be localized, called Tags, (iii) a localization server that executes a centralized localization algorithm and (iv) a Graphic User Interface (GUI) that displays the current status of the RTLS. To meet the stringent robotics requirements some features of the RTLS need to be enhanced and the current localization performance needs to be improved.
Objectives
The aim of this thesis is to analyse the new robotics requirements, analyse the existing Firmware (FW) solution for the UWB devices (i.e., Tags, Anchors), and design and develop the Firmware upgrade accordingly. The current RTLS is based on a Time Division Multiple Access (TDMA) protocol, which allows the localization of many Tags, and employs a ranging method called Two-Way Ranging (TWR), which avoids the need to have Anchors perfectly synchronized in time.
In order to enhance the UWB-based RTLS some new important features need to be implemented such as: autocalibration of the Anchors, uplink and downlink of the UWB communication between the localization server and the Tags, make the TDMA protocol customizable for different needs (e.g., localization frequency, number of Anchors involved in the ranging process with a Tag).
The implemented new FW solutions will be tested in the Robotic Laboratory by using UWB devices developed by LINKS. Moreover, the localization performance will be evaluated by using our VICON system, based on infrared cameras, as a ground truth.
Duration: 6-8 months.
Contact: please send a resume with attached the list of exams passed during the Bachelor of Science and Master of Sciences to delos.campos@linksfoundation.com and francesco.sottile@linksfoundation.com
Thesis Code: 23003
Thesis Type: M.Sc. thesis in Computer Science, Mechatronics, Electronics, Information Technology
Research Domain: Future Cities & Communities
Requirements
• Experience with Python
• Interest in Natural Language Processing
• Skills in descriptive and inferential statistics and in the use of statistical softwares
• Skills on data science (analysis and processing)
• Ability to represent data
Description
For a technology to be widely accepted by the public, it is not enough that it brings benefits. The public needs also to be highly involved in order to understand whether to use new technology. According to several research studies, at present, the level of awareness and understanding of UAM (Unmanned Air Mobility) / UAV (Unmanned Air Vehicles) is very low among people.
The objective of this thesis is to assess the public acceptance of UAV/UAM using statistical models (e.g. UTAUT, TRA, TPB) or by mining social data with text mining / machine learning algorithms related to natural language processing.
Firstly, the candidate will carry out a review of public acceptance evaluation methods with respect to UAV/UAM, defining: domains of application of UAV/UAM, main constraints recognised by the general public, and effective strategies to foster the public acceptance. Then, the candidate will assess public acceptance. The candidate will have both the task of collecting and evaluating the data of the case study. Such a data-driven approach could be helpful to measure community awareness and engagement around UAM/UAV-related topics. Findings can constitute policy insights for those cities and regions that are already equipping themselves to introduce air mobility services.
The thesis will be carried out in collaboration between LINKS and the University of Turin.
Contact: send a resume with attached the list of exams to maurizio.arnone@linksfoundation.com specifying the thesis code and title.
Thesis Code: 23001
Thesis Type: M.Sc. thesis in ICT for Smart Societies / M.Sc. thesis in Mobility Engineering / M.Sc. thesis in Civil Engineering / M.Sc. thesis in Mathematical Engineering / equivalent
Research Area: Future Cities & Communities
Requirements
• Interest in transport models and planning
• Experience in data analysis
• Experience with main programming languages (Python, C/C++)
• Interest in using Geographic Information Systems (GIS)
• Ability to critically interpret analytical results
Description
The diffusion of autonomous vehicles and their consequent impact on traffic and on the urban system represents an emerging topic of research and of increasing interest in the academic, industrial and institutional fields.
This thesis is conducted as part of a mobility project, the aim of which is to investigate some issues related to the diffusion of autonomous vehicles in the urban environment, including: (i) the development of different scenarios of autonomous vehicles diffusion, that use data on the interactions between autonomous vehicles and other road users; (ii) the development of a traffic simulation environment to evaluate the impacts of different scenarios of autonomous vehicles diffusion on traffic congestion; (iii) the impact of the integration of autonomous vehicles into the urban system, in terms of transport safety and efficiency and environmental impact.
The models can be tested on a case study of interest (e.g. the city of Turin) to outline possible scenarios for the public decision maker and to support urban planning processes. Based on the candidate’s skills and interests, it will be possible to carry out an in-depth analysis on transport models and / or urban planning policies.
Contact: send a resume with attached the list of exams to maurizio.arnone@linksfoundation.com specifying the thesis code and title.
Thesis Code: 22002
Thesis Title: Automatic design of Metasurface Antennas
Thesis Type: Master Thesis for Telecommunication/Electronic Engineering, Computer Science, Mathematics, Physics or equivalent
Research Area: Advanced Computing, Photonics and Electromagnetics (CPE)
Requirements
- MS students in Telecommunication Engineering and Electronic Engineering
- Basic knowledge of EM fields
- Experience with Matlab
- Knowledge of antenna modelling software (CST, Feko, etc.)
Description
Metamaterials are artificial materials composed of various inclusion types embedded in a host medium in specific arrangements. Unusual metamaterial electromagnetic behavior can be achieved with metamaterials (e.g. cloaking), by leveraging both the properties of the elementary constituent materials and the inclusion spatial arrangement. A metasurface (MTS) [1] is a thin metamaterial layer (2D metamaterial). MTS can be designed to provide engineered boundary conditions for controlling the propagation of surface waves and radiation [2]. Applications of MTS range from on board antennas for satellite communications (low profile, high performances antennas) to biomedical and nanoscale application.
This thesis aims at the automatic design of MTS antennas using in-house modelling and optimization codes, at the validation of the designed MTS antennas with commercial software, and at the improvement of the modelling and optimization codes to face new and challenging scenarios.

References
- Faenzi, et al. “Metasurface Antennas: New Models, Applications and Realizations”, Sci. Rep. Vol. 9, 2019
- A. Francavilla, E. Martini, S. Maci and G. Vecchi, “On the Numerical Simulation of Metasurfaces With Impedance Boundary Condition Integral Equations”, IEEE Transactions on Antennas and Propagation, vol. 63, no. 5, 2015.
Contact: send a resume with attached the list of exams to marco.righero@linksfoundation.com specifying the thesis code and title.
Thesis Code: 22004
Thesis Type: Master Thesis for Telecommunication/Electronic Engineering
Research Area: Advanced Computing, Photonics and Electromagnetics (CPE)
Requirements
- MS students in Telecommunication Engineering, Electronic Engineering, or equivalent
- Basic knowledge of EM fields
- Experience with Matlab
- Experience with FPGA programming and simulation (Verilog, VHDL)
- Good knowledge of basic DSP algorithms
Description
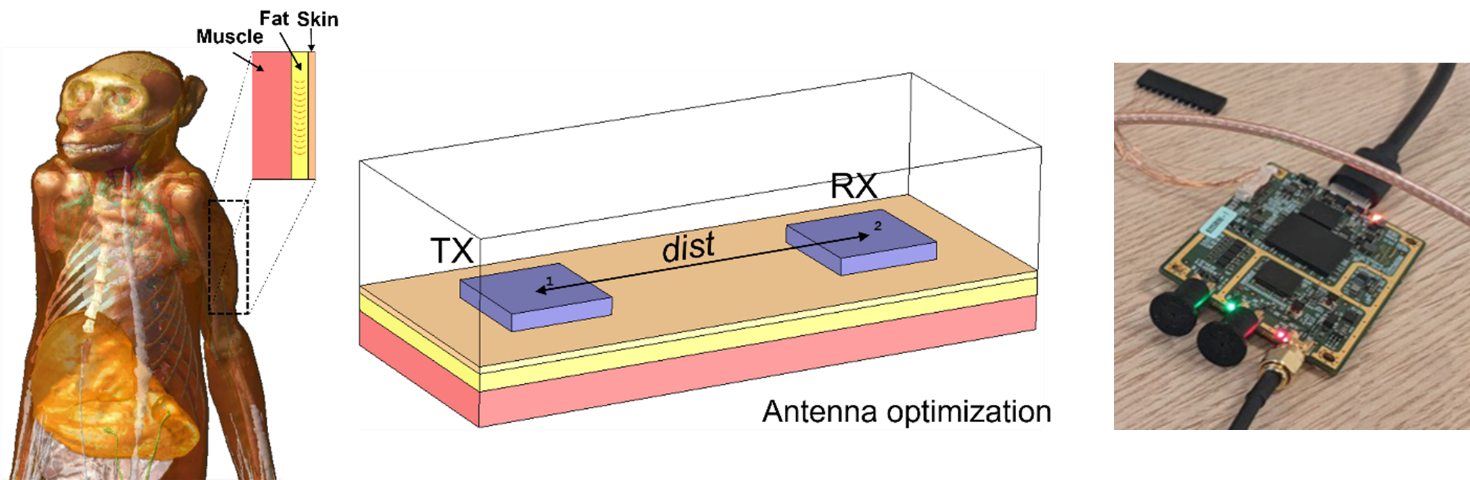
Fat intra-body communication (Fat-IBC) is an innovative technique exploiting the very low electrical conductivity of the fat tissue layer (0.11 S/m) to transmit electromagnetic signals through the human body [1]. This technique is really promising for the implementation of wireless, in-body, bidirectional Brain-Machine-Body connectivity, providing an excellent low-loss communication channel for implantable and wearable networks, such as inter-connect wireless medical sensors [2]. This thesis falls within the EU H2020 FET Open project B-CRATOS (“Wireless Brain-Connect inteRfAce TO machineS”, https://www.b-cratos.eu/) (965044). One of the objectives of this project is to implement a bidirectional wireless connection system between brain and a prosthetic arm, paving the way to the creation of a proof-of-concept, revolutionary untethered brain-machine interface. To verify the feasibility of this system, non-human primates (NHP) will be considered for non-invasive testing.
This thesis aims at the design of wearable aggregators comprising of properly optimized epidermal antennas and modulation-demodulation electronics to communicate simultaneously to/from neural transceivers. Tests on numerical and realistic phantoms are foreseen within the thesis period.
References
- B. Asan et al., “Intra-body microwave communication through adipose tissue,” Healthc. Technol. Lett., vol. 4, no. 4, pp. 115-21, 2017.
- B. Asan, et al., “Data packet transmission through fat tissue for wireless intrabody networks,” IEEE J. Electromagn., RF, Microw. Med. Biol., vol. 1, no. 2, pp. 43-51, 2017.
Contact: send a resume with attached the list of exams to rossella.gaffoglio@linksfoundation.com specifying the thesis code and title.
Thesis Code: 22003
Thesis Type: Master Thesis for Telecommunication/Electronic Engineering
Research Area: Advanced Computing, Photonics and Electromagnetics (CPE)
Requirements
• MS students in Telecommunication Engineering, Electronic Engineering, or equivalent
• Experience with embedded software programming using the C language
• Knowledge of data acquisition and control systems
• Basic knowledge of PCB design
• Good knowledge of basic concepts of RF electronics
• Basic knowledge of EM fields
• Experience with electronic instruments (the thesis will include laboratory activities)
Description
Microwave cancer hyperthermia is a type of medical treatment in which tumor cells are selectively exposed to a supra-physiological temperature (42/43 °C) using proper antenna systems [1]. For internal tumors, this is currently achieved by means of an array of antennas equipped with a proper cooling system (the water bolus) to avoid overheating of the skin [2]. Since the effectiveness of a hyperthermia treatment is strictly dependent on the quality of the heating process, a treatment planning is fundamental to optimally set the amplitudes and phases of the applied signals. In order to maximize the effectiveness of the selective heating process, a real-time control of the antenna feeding parameters is required, together with an active control system to correct any non-ideal behaviour, thus ensuring the gain and phases remain constant throughout the whole operation of the system.
Starting from a demonstrator reproducing an array applicator for hyperthermia in the head and neck region, this thesis aims at designing an all-in-one solution for the control of the antenna array, including the source signal generation, the measurement, and the control system, on a single PCB.

References
1. N. R. Datta et al., “Local hyperthermia combined with radiotherapy and-/or chemotherapy: Recent advances and promises for the future,”, Cancer Treat. Rev., vol. 41, no. 9, pp. 742-53, 2015.
2. M. M. Paulides et al., “The HYPERcollar: A novel applicator for hyperthermia in the head and neck,” Int. J. Hyperthermia, vol. 23, no. 7, pp. 567-76, 2007.
Contact: send a resume with attached the list of exams to rossella.gaffoglio@linksfoundation.com specifying the thesis code and title.
Thesis Code: 21001
Thesis Type: Global Navigation Satellite System (GNSS), Computer Science, Cybersecurity
Research Area: Cybersecurity of systems based on GNSS data
Requirements:
- Knowledge of GNSS, GNSS data and GNSS receivers
- Knowledge of Linux Operating System
- Interest in Cybersecurity and Trust technologies
- Curiosity-driven mindset
Description
GNSS technologies has been constantly growing in the last years and GNSS receivers have been adopted in the most different fields of applications such as: road tolling, secure autonomous driving, location-based services, synchronization of networks (e.g. telco, energy grids, etc.), financial transactions. GNSS receivers and connected devices integrating and making use of these receivers are all vulnerable to intentional attacks exploiting different attack vectors (e.g. GNSS signals, operating systems & software and communication networks). The feasible chance to exploit vulnerabilities and intentionally modify GNSS data create incentives for the attackers that want to impair or fool any systems that has a dependency in GNSS. Every system that make use of GNSS data, either when they are estimated from the satellite constellation or received from a network peer must solve/answer the same question: can I trust the GNSS data and take safe decisions and operate in accordance to them? There is, therefore, a pressing need to analyze threats and vulnerabilities along the whole chain (i.e. from satellite to system and user on earth) to designs, develop and test solution to digitally Trust in GNSS data.
The thesis will be structured as follows:
- analysis of threats and vulnerabilities of a reference system that makes use of GNSS data;
- state-of-the-art analysis of cyber technologies to “Trust-by-verify” GNSS data;
- design and development of a simple proof-of-concept (PoC);
- in-lab testing;
- drawing conclusions and formulating a research roadmap.
Contact: send a resume with attached the list of exams to andrea.vesco@linksfoundation.com specifying the thesis code and title.
Thesis Code: 20019
Thesis Type: Master Thesis for Telecommunication/Electronic Engineering, Biomedical Engineering, Computer Science, Mathematics, Physics or equivalent
Research Area: Advanced Computing, Photonics and Electromagnetics (CPE)
Requirements
- MS students in Telecommunication Engineering, Electronic Engineering, Biomedical Engineering, Computer Science, Mathematics, Physics or equivalent
- Basic knowledge of EM fields
- Experience with Matlab
- Good knowledge of linear algebra and linear systems
Description
Hyperthermia is a type of cancer treatment in which tumors are exposed to a supra-physiological temperature (42/43 °C) by means of proper antenna systems to sensitize cancer cells towards radiation and drugs [1]. Temperature control is crucial in hyperthermia treatments, to check the effectiveness of the heating in the target region and to avoid dangerous hotspots in the surrounding healthy tissues. In current clinical practice, temperature monitoring is achieved in an invasive manner, with temperature probes inserted into closed-tip catheters [2]. An extensive and innovative use of high-performance simulations carried out prior to treatment seems to be a promising way to produce accurate and reliable temperature maps during treatment from a minimal number of direct measurement points. This could provide dual benefit to the patient, yielding accurate temperature estimations in points where temperature is not known, and reducing the infection risk via a minimal use of catheters.
This thesis aims at implementing an efficient “library” of high-performance simulations of a numerical phantom, verifying the possibility to obtain reliable temperature maps of the whole region of interest from scarce data acquisition. A high-fidelity computable human phantom from the Virtual Population of the simulation software Sim4Life will be used for this study.

References
- R. Datta et al., “Local hyperthermia combined with radiotherapy and-/or chemotherapy: Recent advances and promises for the future,”, Cancer Treat. Rev., vol. 41, no. 9, pp. 742-53, 2015.
- M. Paulides et al., “Status quo and directions in deep head and neck hyperthermia,” Radiat. Oncol., vol. 11, no. 21, pp. 809-21, 2016.
Contact: send a resume with attached the list of exams to rossella.gaffoglio@linksfoundation.com and marco.righero@linksfoundation.com specifying the thesis code and title.
Thesis Code: 20017
Thesis Type: Master Thesis for Telecommunication/Electronic Engineering, Computer Science, Mathematics, Physics or equivalent
Research Area: Advanced Computing, Photonics and Electromagnetics (CPE)
Requirements
- MS students in Telecommunication Engineering, Electronic Engineering, Computer Science, Mathematics, Physics or equivalent
- Experience with main programming languages (Python/Matlab /Fortran/C/C++)
- Basic knowledge of EM fields and wave propagation
- Basic knowledge of numerical methods for ODEs integration
Description
The link communication from/to satellite, re-entry or space vehicles is often subject to degradation known as black-out. To assess this issue, radio frequency (RF) wave propagation through complex media [1] (such ionosphere, plasmas and complex gas mixtures) must be considered. Asymptotic techniques such as ray or beam tracing [2] can be used to predict EM propagation in these inhomogeneous media. Coupled with integral equations for free-space radiation they provide a powerful numerical tool to design antennas for critical applications.
This thesis aims to develop and improve both physical model and numerics of the exiting tools in order to improve accuracy and range of applications for RF complex media propagation. The improved model will be applied in the analysis of communication link of real re-entry vehicle in earth or extra-terrestrial atmosphere.

References
- A. Kravtsov, Y.I. Orlov, “Geometrical Optics of Inhomogeneous Media”, In: Springer Serie on Wave Phenomena, vol 6, Springer, Berlin 1990.
- Kim and L. Ling, “Electromagnetic Scattering by Inhomogeneous Object by Ray Tracing” IEEE Trans. Antennas Propagat., Vol. 40 No.5 May 1992.
Contact: send a resume with attached the list of exams to andrea.scarabosio@linksfoundation.com specifying the thesis code and title.
Thesis Code: 20016
Thesis Type: Master Thesis for Telecommunication/Electronic Engineering, Computer Science, Mathematics, Physics or equivalent
Research Area: Advanced Computing and Applications
Requirements
- MS students in Computer Science
- Experience with main programming languages (Matlab /Fortran/C/C++)
- Knowledge of parallel computing (MPI)
Description
Numerical simulations are routinely employed to model complex systems, as electromagnetic waves propagation. In a similar way, maps are used to describe physical locations [1]. However, if one wants to study different responses varying the parameters of the systems, the computational burden becomes too large, and often just a reduced part of the system output is of interest. In the maps analogy, one is interested just in the public transportation network to plan different routes. From a computational point of view, simpler and compact models can be constructed from representative solutions of the complete system, using different techniques to combine them together [1,2].

This thesis aims at porting existing code for electromagnetic simulation on a distributed architecture, with the specific aim of using it for building reduced order models for Computational Electromagnetics.
References
- C. Antoulas Approximation of Large-Scale DynamicalSystems, 2005, SIAM
- Hochman, J.Fernandez Villena, A. G. Polimeridis, L. M. Silveira, J. K. White, L. Daniel, ‘Reduced-Order Models for Electromagnetic Scattering Problems’, Antennas and Propagation, IEEE Transactions on , vol.62, no.6, pp.3150, 3162, April 2014, doi: 10.1109/TAP.2014.2314734
- London images are from Wikipedia, GoogleMaps, and Transportation for London
Contact: send a resume with attached the list of exams to marco.righero@linksfoundation.com specifying the thesis code and title.
Thesis Code: 20015
Thesis Type: Master Thesis for Telecommunication/Electronic Engineering, Computer Science, Mathematics, Physics or equivalent
Research Area: Advanced Computing and Applications
Requirements
- MS students in Telecommunication Engineering, Electronic Engineering, Computer Science or equivalent
- Experience with main programming languages (Matlab /Fortran/C/C++)
- Basic knowledge of EM fields
- Basic knowledge of linear algebra and linear systems
- Experience with Electronic instruments (the thesis will include laboratory activities)
Description
The exhaustive RF end-to-end testing of an antenna can be complex and time consuming. Due to the sampling criteria limit, the measurement time associated with these complex tests becomes easily prohibitive. Advanced strategies for end-to-end test time reduction are very appealing and recently [1,2], an algorithm based on a properly hybridization of measurements and simulations has been proposed, to demonstrate the possibility to perform a radical under sampled field measurement of the Antenna Under Test (AUT), with respect to the conventional Nyquist criteria.

The thesis would like to improve the performance of the algorithm by investigating the possibility to extend the method to other domains (e.g. frequency, space, etc.).
References
- J. Foged, L. Scialacqua, M. Bandinelli, M. Bercigli, F. Vipiana, G. Giordanengo, M. Sabbadini, and G. Vecchi, “Numerical Model Augmentend RF Test Techniques,” in 6th European Conference on Antennas and Propagation, EuCAP, March 2012.
- J. Foged, L. Scialacqua, F. Saccardi, M. Bandinelli, M. Bercigli, G. Guida, F. Vipiana, G. Giordanengo, M. Sabbadini, and G. Vecchi, “Innovative Approach for Satellite Antenna Integration and Test/Verification,” in 34th Symposium of the Antenna Measurement Techniques Association (AMTA), October 2012.
Contact: send a resume with attached the list of exams to giorgio.giordanengo@linksfoundation.com specifying the thesis code and title.
Thesis Code: 20014
Thesis Type: Master Thesis for Telecommunication/Electronic Engineering, Computer Science, Mathematics, Physics or equivalent
Research Area: Advanced Computing and Applications
Requirements
- MS students in Telecommunication Engineering, Electronic Engineering, Computer Science, Mathematics or equivalent
- Experience with main programming languages (Matlab /Fortran/C/C++)
- Basic knowledge of EM fields
- Good knowledge of linear algebra and linear systems
Description
Solutions to Maxwell’s equations are known only for a few simple geometries; this is where the scientific discipline known as Computational Electromagnetics (CEM) comes into play, aiming at a numerical solution of the equation in presence of non-trivial geometries/materials.
The thesis aims at developing fast and efficient algorithms for the solution of Maxwell’s equations, with special attention to:
- large patch antenna arrays
- large and complex structures (e.g., satellites, aircrafts, etc.)

Contact: send a resume with attached the list of exams to marco.righero@linksfoundation.com specifying the thesis code and title.
Thesis Code: 20012
Thesis Type: Computer Science, Cybersecurity
Research Area: Cybersecurity
Requirements:
- Experience with main Programming Languages (C/C++; JavaScript; Python)
- Knowledge of Cybersecurity and Internetworking
- Basic knowledge of Distributed Ledger Technologies (DLT)
- Curiosity-driven mindset
Description
The Internet of Things (IoT) is a quickly growing segment of today’s Internet, enabling connectivity between smart devices. Digital Trust among IoT devices needs to be built and data properly protected. Distributed Ledger Technologies (DLTs) play an important role to secure IoT. Among the different DLTs, the IOTA Ledger [1] is well suited to serve the IoT of the world by providing a simple and efficient way to build digital trust among devices and secure the integrity and verifiability of data exchanged.
The thesis will be structured as it follows:
- analysis of the IOTA Ledger: the Tangle;
- deployment of a private Tangle;
- design and development of an application to securely interact with the Tangle: write & read stream of IoT data;
- in-lab testing verification and measurement of the performance of the approach.
References
[1] IOTA Foundation, IOTA Tangle; available at https://www.iota.org
Contact: send a resume with attached the list of exams to andrea.vesco@linksfoundation.com specifying the thesis code and title.
Thesis Code: 20003
Thesis Type: M.Sc. thesis in Machine Learning, Data Science, Computer Science, Mathematics, or equivalent
Research Area: Data Science for Industrial and Societal Application
Requirements:
- Knowledge of Python
- Software development skills
- Basic concepts on data science, concerning data analysis, processing and machine learning
- Basic concepts on machine learning
Description:
For parcel delivery services it is essential to have a system able to certify the delivery of the package by the courier. Therefore, in a scenario where companies are embarking on the digitalization race, it is necessary for logistics services to have smart media to speed up and make delivery certification methods more precise. For this reason, we propose a thesis that aims to create an intelligent system based on speech recognition and vocal recognition that allows at the same time to recognize the confirmation words pronounced by the recipient and to certify that the person who is receiving the package belongs to a list of suitable users.
The objective of this thesis consists in the study and implementation of machine learning algorithms useful for speech and vocal recognition. The proposed algorithms will be trained using open datasets. The candidate will have both the task of collecting the benchmark datasets and evaluating the best algorithms to apply for the case of study. The work has to be performed with audio processing algorithms including deep learning algorithms using popular framework (TensorFlow, PyTorch, Keras, etc..).
An optional step could be the study and the deploy of the algorithms in wearable devices (smart watches, smart band, etc..).
Contact: send a resume with attached the list of exams to mirko.zaffaroni@linksfoundation.com specifying the thesis code and title.
Thesis Code: 19023
Thesis Type: B.Sc. thesis in Computer Science, Mathematics, or equivalent
Research Area: Data Science for Industrial and Societal Application
Requirements:
- Knowledge of Python
- Software development skills
Description:
Self-driving technology presents a rare opportunity to improve the quality of life in many of our communities. Avoidable collisions, single-occupant commuters, and vehicle emissions are choking cities, while infrastructure strains under rapid urban growth. Autonomous vehicles are expected to redefine transportation and unlock a myriad of societal, environmental, and economic benefits. From a technical standpoint, however, the bar to unlock technical research and development on higher-level autonomy functions like perception, prediction, and planning is extremely high. For this reason, we want to integrate available open data, with synthetic data created with the aid of a virtual environment.
The objective of this thesis consists in the study and implementation of a framework useful for collecting data of surrounding vehicles in a virtual environment. This is created with the help of dedicated tools for extracting information from the Grand Theft Auto V graphic engine and AirSim open source simulator.
The candidate will have both the task of creating the framework for extracting data and studying and evaluating the best way to save them. The data created will be used for machine learning algorithm in future works.
Contact: send a resume with attached the list of exams to mirko.zaffaroni@linksfoundation.com specifying the thesis code and title.
Thesis code: 19021
Thesis type: M.Sc. thesis in Environment, Land and Infrastructure Engineering / M.Sc. thesis in Territorial, Urban, Environmental and Landscape Planning / equivalent
Research Area: Urban Mobility & Logistic Systems
Requirements
- Interest in transport models and planning
- Experience in data analysis
- Experience with Geographic Information Systems (GIS)
- Ability to critically interpret analytical results
Description
The diffusion of autonomous driving vehicles and their consequent impact on the urban system represent an emerging topic of research and of increasing interest in the academic, industrial and institutional fields.
This thesis project aims to investigate some issues related to the diffusion of autonomous driving vehicles in the urban context, including: (a) the development of different scenarios of autonomous vehicles diffusion, (b) the impact evaluation of different autonomous vehicles diffusion scenarios, (c) the simulation of urban traffic after a replacement of the circulating vehicle fleet with such vehicles.
The models can be tested on a case study of interest (the city of Turin) to outline possible scenarios for the public decision maker and to support urban planning processes. Based on the candidate’s skills and interests, it will be possible to carry out an in-depth analysis on transport models and / or urban planning policies.
The thesis will be carried out in collaboration between the Links Foundation (Urban Mobility & Logistic Systems Area) and the Polytechnic of Turin (Department of Environment, Land and Infrastructure Engineering / Interuniversity Department of Regional and Urban Studies and Planning).
Contacts: send a resume with attached the list of exams to maurizio.arnone@linksfoundation.com specifying the thesis code and title.
Thesis Code: 19020
Thesis Type: M.Sc. thesis in Mathematical Engineering
Research Area: Urban Mobility & Logistic Systems
Requirements
- Familiarity with differential models and partial differential equations
- Experience with main programming languages (Python, C/C++)
- Interest in Transport Planning
- Ability to critically interpret analytical results
Description
The penetration of driver-assists/autonomous vehicles and their consequent impact on traffic is an emerging, thus still under-explored, research topic in the realm of Artificial Intelligence.
The thesis will be carried out in the UML area (Urban Mobility & Logistic Sytems) of the LINKS Foundation. There will be a strict interaction with the research group of Prof. Andrea Tosin at the Department of Mathematical Sciences “G. L. Lagrange” of Politecnico di Torino.
The thesis project is grounded on three main methodological aspects: modelling, model analysis and numerical simulation, which may be more or less developed according to the student’s taste. After deepening the state of the art on methods for traffic modelling, the student will be asked to develop a mesoscopic model for simulating the flow of vehicles and to analyse alternative penetration scenarios for driver-assist/autonomous vehicles. In particular, the model will be possibly tested on a case study of interest (such as e.g., the city of Turin) using the software MATSim and discussing critically the results. The latter may be used to outline recommendations and suggestions for the public decision maker and as an input to urban planning processes.
References
- Pareschi, G. Toscani. Interacting Multiagent Systems: Kinetic Equations and Monte Carlo Methods, Oxford University Press, Oxford, UK, 2013
- Tosin, M. Zanella. Control strategies for road risk mitigation in kinetic traffic modelling, IFAC-PapersOnLine, 51(9):67-72, 2018
- Tosin, M. Zanella. Kinetic-controlled hydrodynamics for traffic models with driver-assist vehicles, Multiscale Model. Simul., 17(2):716-749, 2019
- Tosin, M. Zanella. Uncertainty damping in kinetic traffic models by driver-assist controls, preprint, 2019 (available at: http://doi.org/10.13140/RG.2.2.35871.41124)
Contacts: send a resume with attached the list of exams to maurizio.arnone@linksfoundation.com specifying the thesis code and title.
External Links: https://didattica.polito.it/pls/portal30/sviluppo.tesiv.elenchi?sdu=&idt=8030&lang=IT&opng=&opnc=
Thesis Code: 19019
Thesis Type: M.Sc. thesis in Computer Science
Research Area: Urban Mobility & Logistic Systems
Requirements:
- Interest in machine learning algorithms
- Experience with Python
- Ability to critically interpret analytical results
Description:
Although smart tickets are increasingly common in public transport, few cities are equipped with an automatic fare collection (AFC) system that can provide information on both boarding (check-in) and alighting (check-out) users’ locations. In fact, usually only check-in ticket validation is mandatory, and it is therefore necessary to estimate the destination of passengers.
The student will have to study a deep learning model to estimate the destinations of public transport passengers, using the electronic ticketing data available in the province of Cuneo. The student will be asked to implement the algorithm in Python and validate the model using the data available on the passengers’ check-out. Furthermore, the student will have to evaluate the model’s performance against a Trip-Chaining model currently in use on the same data, identifying the advantages and disadvantages of the different estimation models.
The thesis will be carried out in collaboration between the Links Foundation (Urban Mobility & Logistic Systems Area) and the Polytechnic of Turin (Department of Control and Computer Engineering).
Contact: send a resume with attached the list of exams to maurizio.arnone@linksfoundation.com specifying the thesis code and title.
Thesis Code: 19016
Thesis Type: M.Sc. thesis in Machine Learning, Data Science, Computer Science, Mathematics, or equivalent
Research Area: Data Science for Industrial and Societal Application
Requirements:
- Knowledge of Python
- Software development skills
- Basic concepts on data science, concerning data analysis, processing and machine learning
- Basic concepts on image processing
Description:
Predicting pedestrian’s future path is important for both self-driving cars and security systems. In fact, it allows to prevent dangerous situations such as traffic accidents between cars and people or collision between autonomous robot and people. Pedestrians follow different trajectories to avoid obstacles and accommodate fellow pedestrians. Any autonomous vehicle navigating such a scene should be able to foresee the future positions of pedestrians and accordingly adjust its path to avoid collisions.
The objective of this thesis consists in the study and implementation of machine learning algorithms useful for predicting the path a pedestrian will take in the successive frames of a video sequence. The proposed algorithms will be trained using a synthetic dataset and open datasets. This is created with the help of dedicated tools for extracting information from the Grand Theft Auto V graphic engine. The candidate will have both the task of creating the dataset and studying and evaluating the best algorithms to apply for the case of study. The type of algorithms being studied and tested are to be classified among those of video analysis, with the exploratory possibility of deep learning algorithms using popular framework (TensorFlow, PyTorch, Keras, etc…).
Contact: send a resume with attached the list of exams to mirko.zaffaroni@linksfoundation.com specifying the thesis code and title.
Thesis Code: 19015
Thesis Type: M.Sc. thesis in Environment, Land and Infrastructure Engineering, Data Science, Mathematical Engineering, Mathematics, or equivalent
Research Area: Urban Mobility & Logistic Systems
Requirements
- Experience with main programming languages (Python, C/C++)
- Interest in algorithms
- Ability to critically interpret analytical results
Description
The extra-urban public transport services currently in operation are often the result of a planning designed to meet the needs of an outdated mobility demand that is very different from today’s one, since it was characterized by a strong prevalence of systematic travels and a well-defined profile outlined during the day. Today the demand has become much more complex and articulated than once -in terms of travel reasons, schedules and routes- and requires a continuous service during the day, capable of providing “the guarantee of return”. The current transport service does not adequately respond to these new needs.
The student will have to study the electronic ticketing data (BIP) of the extra-urban services of the Cuneo area, understand how the users of public transport move in the territory, and study and develop a Python algorithm able to simulate the conversion of the entire extra-urban public transport service in demand-based service (i.e. on-call service), able to customize the offer according to the real needs of the user.
The thesis will also address the estimate and the assessment of the economic impacts of such services on companies and users.
Contact: send a resume with attached the list of exams to maurizio.arnone@linksfoundation.com specifying the thesis code and title.
Thesis Code: 19009
Thesis Type: Master Thesis for Computer Engineering, Electronic Engineering
Research Area: Advanced Computing & Applications
Requirements
- MS students in Electronic Engineering, Computer Engineering
- Experience with main programming languages (Python, C/C++, Go), algorithms
Description
The pace at which Cloud based services are adopted is pushing Cloud service providers (CSPs) to adopt more heterogeneous resources in their data centers. Computing resource diversification is pushed also by the growing adoption of machine learning and deep learning algorithms (also HPC applications are going in this direction), which generally require specialized hardware to efficiently execute. Managing resources and tasks (i.e., deciding an allocation of the tasks under a certain set of constraints) at large scale requires innovative scheduling techniques. However, current schedulers still rely on simple strategies to assign tasks to available resources.
The objective of the work is to study innovative approaches for managing resources in Cloud-HPC environments. To this end, machine learning and evolutionary based techniques will be considered for improving the quality of task scheduling when heterogeneous resources are available (e.g., GPUs, FPGAs, dedicated ASICs). Studied techniques will look at improving scheduling under different constraints (energy saving, reducing task makespan, etc.) and combination of them. Targeted technologies include Linux containers and related orchestrators such as Kubernetes.
Contact: Send CV to alberto.scionti@linksfoundation.com and olivier.terzo@linksfoundation.com specifying the thesis code and title.
Thesis Type: Thesis in Computer Science, Data Engineering, Computer Engineering, Mathematical Engineering, Data Science
Research Area: Innovation Development
Requirements:
• Experience with Python and/or Java and/or Node.js
• Basic knowledge of modular development
• Beginner of (or willing to learn quickly) deep learning and natural language processing
• Curiosity-driven mindset.
Description
Public procurement contracts are a rich source of knowledge necessary for seizing the efforts in participating to public procurement calls. However, contracts are usually available in textual format making harder the task of extracting structured information automatically and being used in automated systems. This thesis will focus on extracting structured information from those documents such as specific dates, unique identifiers (VAT id, protocol numbers, telephone number), named entities (places, people, business entities, products). In this thesis the undergraduate will study and experiment with deep learning and natural language processing techniques that are the core of the Artificial Intelligence stack, by understanding the intrinsic semantics of document and identifying and linking pivotal information found in the text to an external database.
The thesis will be structured as follows:
• state-of-the-art analysis of text processing techniques
• problem formulation: objective function, data structures and resources to be used
• algorithm design and prototyping
• in-lab testing verification with real data and measurement of the performance of the approach.
The thesis will be co-tutored with Synapta Srl, a Spin-off of Politecnico di Torino. It will be an opportunity to work also with the Synapta team experimenting with real data. The undergraduate will benefit from being immersed in a existing start-up environment while applying scientific experimental practises learned in ISMB. At the end of the thesis, the undergraduate will be familiar with deep learning and natural language processing techniques, and she/he will acquire an understanding of the public-procurement domain. As additional benefit, she/he will proficiently use control version systems, continuous integration systems, remote deploying and monitoring techniques.
Contact: send a resume with attached the list of exams to giuseppe.rizzo@linksfoundation.com specifying the thesis code and title.
Thesis Type: Thesis in Computer Science, Data Engineering, Computer Engineering, Mathematical Engineering, Data Science
Research Area: Innovation Development
Requirements:
• Experience with Python and/or Java and/or Node.js
• Basic knowledge of modular development
• Beginner of (or willing to learn quickly) machine learning and natural language processing
• Curiosity-driven mindset
Description
Italian public administration websites contain a lot of resources published as open data. However, administrations have multiple websites and each has its own semantic structure making harder to autonomous crawlers retrieving the necessary information. The aim of this thesis project is to develop an intelligent data crawler able to fetch specific types of resources across multiple file formats from selected sources. Relatively low precision and high recall is expected. The crawler should be able to detect relevant resources using state-of-the-art techniques based on machine learning and natural language processing techniques that are the core of the Artificial Intelligence stack.
The undergraduate will study and experiment with technologies for:
• extracting semantics from web resources
• understanding the content
• discriminating about the value of the retrieved content.
The thesis will be structured as follows:
• state-of-the-art analysis of information retrieval
• problem formulation: objective function, data structures and resources to be used
• algorithm design and prototyping
• in-lab testing verification with real data and measurement of the performance of the approach.
The thesis will be co-tutored with Synapta Srl, a Spin-off of Politecnico di Torino. It will be an opportunity to work also with the Synapta team experimenting with real data. The undergraduate will benefit from being immersed in a existing start-up environment while applying scientific experimental practises learned in ISMB. At the end of the thesis, the undergraduate will be familiar with machine learning and natural language processing techniques, and she/he will acquire an understanding of the public-procurement domain. As additional benefit, she/he will proficiently use control version systems, continuous integration systems, remote deploying and monitoring techniques.
Contact: send a resume with attached the list of exams to giuseppe.rizzo@linksfoundation.com specifying the thesis code and title.
Thesis Type: Thesis in Computer Science, Data Engineering, Computer Engineering, Mathematical Engineering, Data Science
Research Area: Innovation Development
Requirements
• Experience with Python and/or Java
• Basic knowledge of modular development
• Beginner of (or willing to learn quickly) machine learning
• Curiosity-driven mindset.
Description
The digital transformation that healthcare has undergone has encouraged the generation of a large quantity of digital clinical notes. Majority of those notes contain unstructured information which complicates the search, analysis, and the understanding of the content. The automated analysis and understanding of those notes is of now one of the biggest challenges in healthcare.
In this thesis the undergraduate will study and experiment with AI-based technologies for:
• extracting and classify key information such as adverse events from clinical notes written in natural language;
• generating a coherent and human-readable summary of a sequence of clinical notes.
The thesis will be structured as follows:
• state-of-the-art critical analysis in the field of artificial intelligence applied to healthcare;
• problem formulation: objective function, data structures and resources to be used;
• algorithm design and prototyping;
• in-lab testing verification with real data and measurement of the performance of the approach.
The thesis will be co-tutored with the Institute of Biomedical Engineering, University of Oxford. As the opportunity arises, there could be the possibility of doing this thesis abroad depending on the requirements and plans of the master you are enrolled in. The undergraduate will benefit from being immersed in a research environment. It is a unique setting to get into a research mindset with a strong push for innovation. At the end of the thesis, the undergraduate will be familiar with deep learning and semantic analysis, and he will acquire an understanding of the healthcare domain. During the project, he will be able to design and implement an intelligent system applied to real case studies. As additional benefit, she/he will use proficiently control version systems, continuous integration systems, remote deploying and monitoring techniques.
Contact: Send a resume with attached the list of exams to giuseppe.rizzo@linksfoundation.com specifying the thesis code and title.
Thesis Type: Thesis in Computer Science, Data Engineering, Computer Engineering, Mathematical Engineering, Data Science
Research Area: Innovation Development
Requirements
• Experience with Python and/or Java
• Basic knowledge of modular development
• Beginner of (or willing to learn quickly) machine learning
• Curiosity-driven mindset.
Description
Automated assistants are now more than ever taking place in our daily life. Assistants are thus asked to generate content according to user’ inputs and contextual objectives. Let take the case of a scientist in his daily task of performing experiments, filling tables and reporting findings. Lots of his time is spent in transcribing findings that have been already elaborated and encoded in tables. The advancements achieved in artificial intelligence support scenarios of co-operation between an artificial intelligence-based assistant and a scientist when writing technical reports. The objective of this thesis will be thus researching and prototyping an intelligent system able to write science starting from tables. In this thesis the undergraduate will develop an AI-based system for writing scientific papers using both semantic analysis and deep learning. The system will be able to learn autonomously from pairs of tables and papers created as gold examples and generate from a newer table a report.
The thesis will be structured as follows:
• state-of-the-art critical analysis in the field of document generation using both semantic analysis and deep learning;
• problem formulation: objective function, data structures and resources to be used;
• algorithm design and prototyping;
• in-lab testing verification with real data and measurement of the goodness of the approach.
The undergraduate will benefit from being immersed in a research environment. It’s a unique setting to get into a research mindset with a strong push for innovation. At the end of the thesis the undergraduate will be familiar with semantic analysis and deep learning and be able to implement an intelligent system. As additional benefit, she/he will use proficiently control version systems, continuous integration systems, remote deploying and monitoring techniques.
Contact: Send a resume with attached the list of exams to giuseppe.rizzo@linksfoundation.com specifying the thesis code and title.
Thesis Type: Thesis in Computer Science, Data Engineering, Computer Engineering, Mathematical Engineering, Data Science
Research Area: Innovation Development
Requirements
• Experience with Python and/or Java
• Basic knowledge of modular development
• Beginner of (or willing to learn quickly) machine learning
• Curiosity-driven mindset.
Description
A critical pain of all organizations is managing competencies of their personnel due to both internal variations of topic characterizations (usually an employee acquires knowledge and evolves his professional competence spectrum) and external towards aligning new trends and market requirements. In this thesis the undergraduate will develop an intelligent system for compressing scientific papers into a list of topics in a lossy manner using both semantic analysis and deep learning. The system will be able to learn autonomously from a set of scientific papers authored by scholars and be able to characterize an unknown scholar starting from her/his set of scientific articles.
The thesis will be structured as follows:
• state-of-the-art critical analysis in the field of document summarization using both semantic analysis and deep learning;
• problem formulation: objective function, data structures and resources to be used;
• algorithm design and prototyping;
• in-lab testing verification with real data and measurement of the goodness of the approach.
The undergraduate will benefit from being immersed in a research environment. It’s a unique setting to get into a research mindset with a strong push for innovation. At the end of the thesis the undergraduate will be familiar with deep learning and semantic analysis and be able to implement an intelligent system. As additional benefit, she/he will use proficiently control version systems, continuous integration systems, remote deploying and monitoring techniques.
Contact: Send a resume with attached the list of exams to giuseppe.rizzo@linksfoundation.com specifying the thesis coda and title.